技術情報
ビンピッキング(バラ積みピッキング)では、対象物が決まった位置になく、その名の通りバラバラに積まれているため、ロボットが自動で掴むためにはロボットに掴むことができる対象物の位置を教えてあげる必要があります。ビンピッキングには最低でも3次元の対象物の位置情報が必要となりますが、3Dカメラであれば、3次元情報取得のためにカメラや対象物を動かすことなくカメラ1台で3次元情報を取得することができます。
本記事では弊社で扱っているIDS社製3DカメラEnsensoのSシリーズを用いたビンピッキング向けのアプリケーション例をご紹介します。
ビンピッキングのアプリケーション
透明のケースに缶コーヒーが複数入っている場合、2Dカメラでは以下のような画像が撮影されます。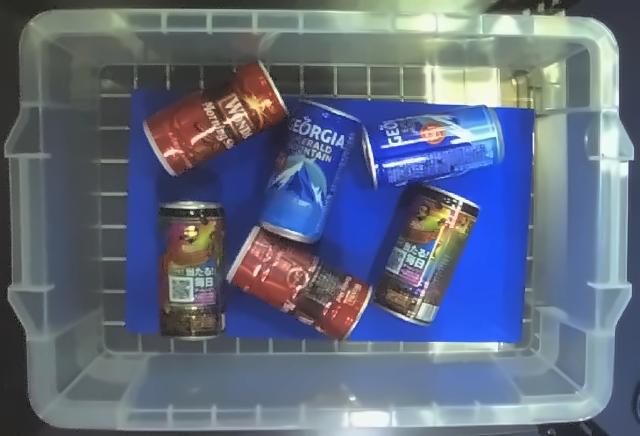
ほぼ同じ位置から3Dカメラ(Ensenso Sシリーズ)で撮影を行った場合、奥行きの情報を疑似カラーとすると以下のようなデータが得られます。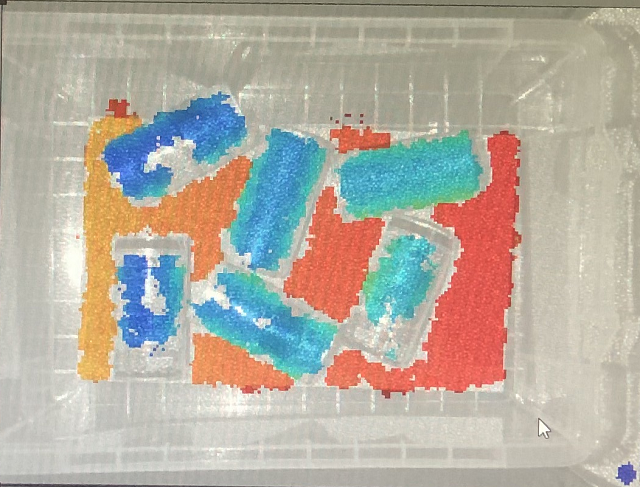
缶が光を反射してしまうため、Ensensoの特性上、奥行きの情報が取得できていない(色がついていない)部分がありますが、この程度の情報でもビンピッキングには十分活用いただけます。
今回、掴む対象が缶コーヒーと分かっているため、あらかじめ缶コーヒーの3次元データを取得しておきます。また、缶コーヒー同士が接触していたり近づきすぎたりしているとロボットが缶コーヒーを掴むための爪が入らないため、爪が入るために必要な間隔を登録しておきます。これらのような設定を用いて、Ensensoで取得した3次元データから一番掴みやすい缶コーヒーの位置情報を出力するよう以下のようにプログラムすることができます。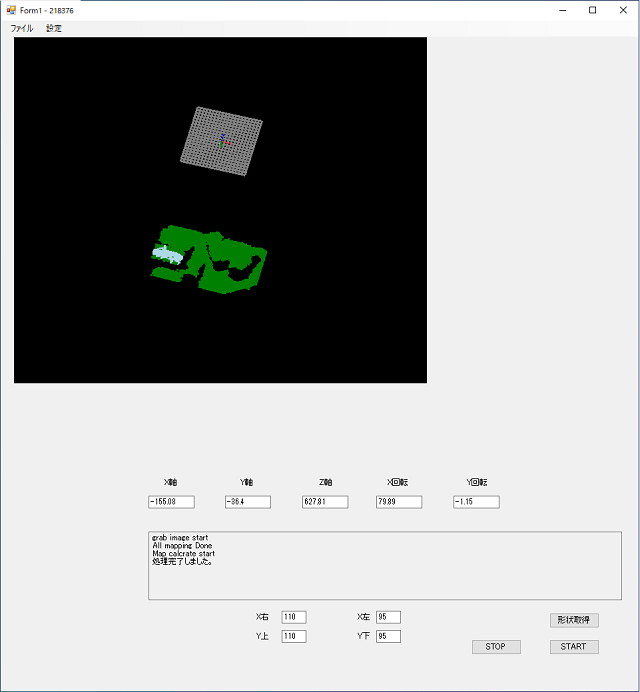
緑色で表示されている部分がEnsensoが取得した3次元データ(点群データ)で、その中に表示されている白色の部分が一番掴みやすい缶コーヒーの位置です。画像下には缶コーヒーの中心の位置座標に加え、登録した向きからどの方向にどれだけ回転しているかが出力されています。これらの情報をロボットに伝えることで、ロボットは缶コーヒーを掴みに行くことができます。
以上のように、ビンピッキング時の対象物の位置情報をEnsensoが取得した3次元データから取得できることをご紹介いたしました。Ensensoはロボットのアームに取り付けられるような小型で軽量なシリーズから最大5mまでの3次元データを取得できるシリーズまで様々なものがございます。ビンピッキングに限らず、3次元データの取得が必要なアプリケーションをご検討でしたら是非お気軽にご相談いただけたらと思います。また、本記事でご紹介したアプリケーションは画像センシング展2022にて実際にデモを行ったもので弊社から販売しております。ソフトウェアにつきましてもお気軽にお問い合わせいただけたらと思います。
関連記事
- 人気記事